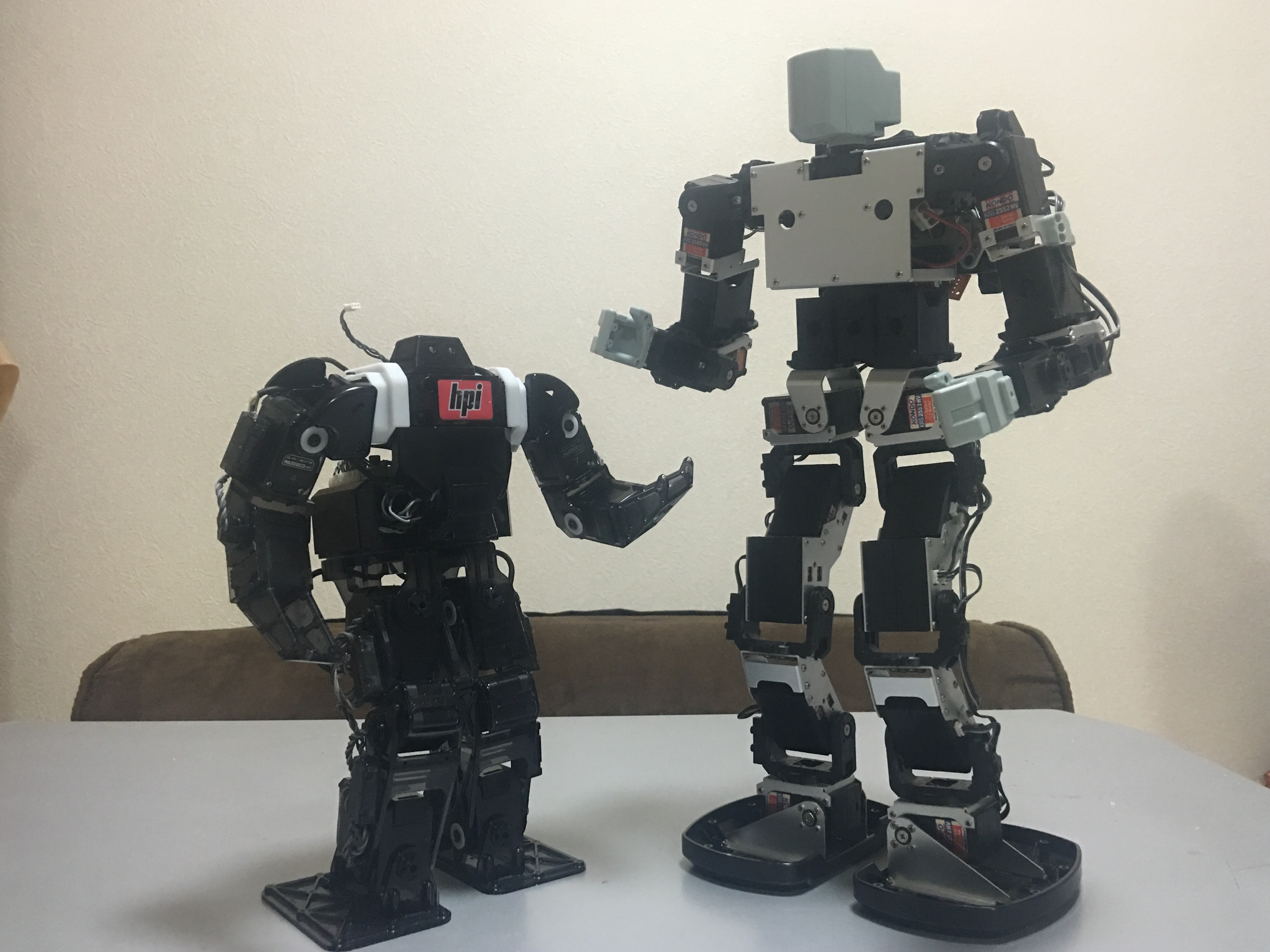
KHR3-HV & GR001 with MATLAB
1.今回の目標
Matlab(2014a)から直接ロボットを制御する.
但し(まずは)
- Matlab本体から(Simlinkにはつながない)
- 有線接続
- 全関節の角度制御のみ
想定するOS
- Ubuntu Linux (14.04)
- Windows 8
- (OSX)
2.方針
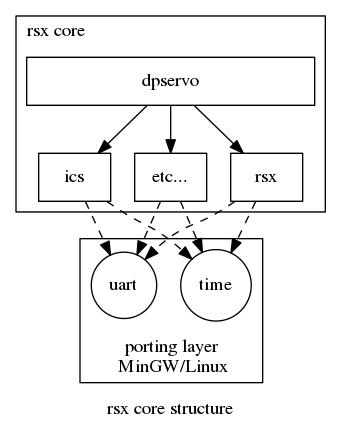
以前製作したライブラリrsxを拡張します.
3.拡張例 (C++ と Python)
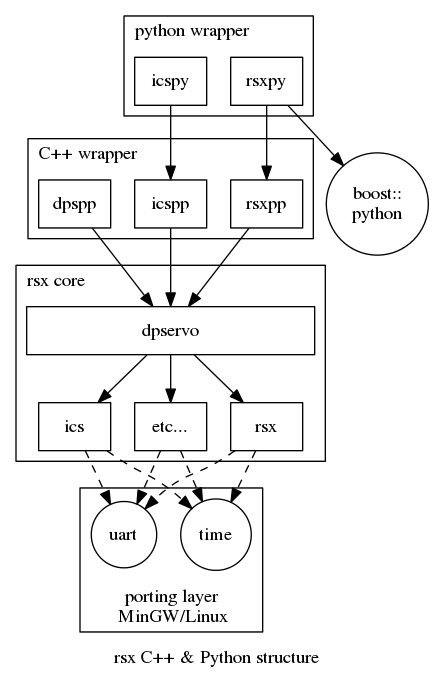
既にC++とPython向けの拡張行っているので,これと同様に拡張します.
C言語で記述されたdpservoを利用する上位レイヤを用意することで実現します.
4.C言語とMatlabの連携
MatlabからC言語で実装されたライブラリを利用する手段には大きく2通り存在します.
- 共有ライブラリをロード&実行する汎用関数を利用する ( *1)
- MATLABが読み込める形式の共有ライブラリ(MEXファイル)を作成する ( *2)
1.の方法は特に追加の作業なしにC言語と連携出来ますが、手順が煩雑です。
今回はより利用手順が簡単な2.の方法をとります.
*1 : http://jp.mathworks.com/help/matlab/using-c-shared-library-functions-in-matlab-.html
*2 : http://jp.mathworks.com/help/matlab/ref/mex.html
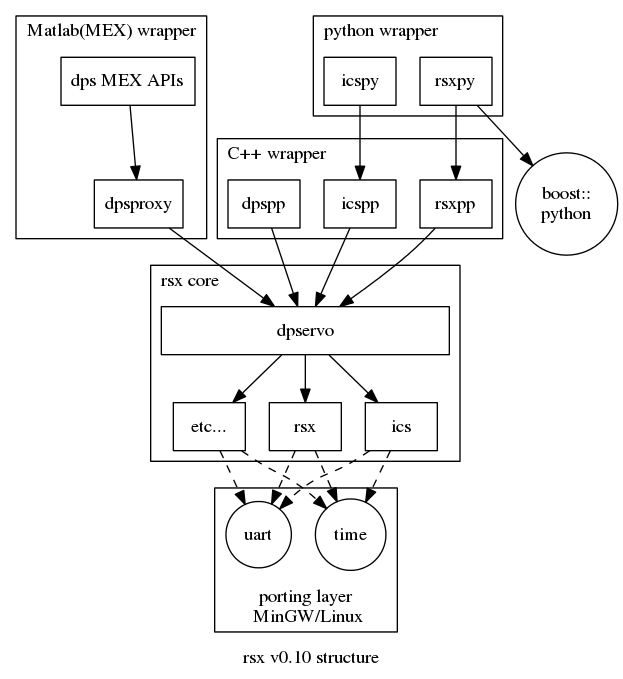
5.librsxのMEX拡張
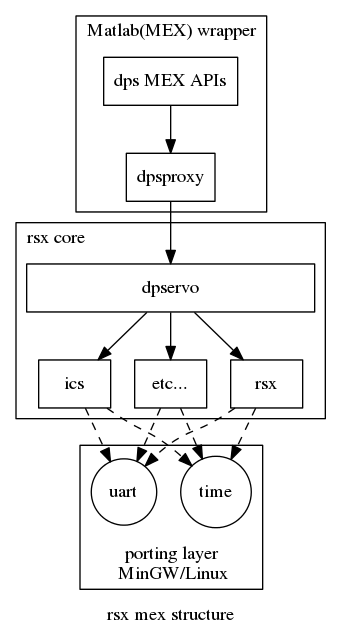
こんな感じになります.
MEXファイル1つに付き1関数しか実装出来ないためAPIの数だけMEXファイルを作成します.
また複数のMEXファイルが共通のハードウェアリソース(シリアルデバイス)を使用します.
このままだとAPIを実行する度にそれらの初期化等を行わなければなりません、
これを回避するためにdpsproxyという層を設けています.
6.C言語におけるMATLAB連携(1/2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
|
#include "mex.h"
#include "matrix.h"
void mexFunction(int nlhs, mxArray *plhs[], int nrhs, const mxArray *prhs[]) {
if (nrhs < 1 || !mxIsChar(prhs[0])) {
mexErrMsgIdAndTxt(
"dps_proxy:EINVAL",
"dps_assign ics|rsx(string)");
return;
}
|
6.C言語におけるMATLAB連携(2/2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
| void mexFunction(int nlhs, mxArray *plhs[], int nrhs, const mxArray *prhs[]) {
int num = mxGetNumberOfElements(prhs[0]);
char name[num + 1];
if (mxGetString(prhs[0], name, num + 1) != 0) {
mexErrMsgIdAndTxt("dps_proxy:ERR","");
}
errno_t eno = dps_proxy_assign(name);
if (eno != EOK) {
mexPrintf("The input string is: %s\n", name);
mexErrMsgIdAndTxt("dps_proxy:ERR","");
}
return;
}
|
7.ビルド手順 Linux
1
2
3
4
5
6
7
8
9
10
11
12
13
14
| // required package
// -- MATLAB (MEXコンパイラのため)
> git clone https://github.com/takarakasai/rsx.git
> cd rsx
> mkdir build
> cd build
> cmake ..
> ccmake ..
CMAKE_INSTALL_PREFIX: 任意のインストールディレクトリ
ENABLE_MATLAB_API : ON
HR_SERIAL_AUTO_READ_ECHO_DATA : ON (ローカルエコー有の場合)
HR_SERIAL_AUTO_READ_ECHO_DATA : OFF (ローカルエコー無の場合)
> make
> make install
|
7.ビルド手順 Windows
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
| // required package
// -- MATLAB (MEXコンパイラのため)
// -- mingw-w64 : http://mingw-w64.org/
// -- gnumex : http://gnumex.sourceforge.net/
// -- git(2.7.1) : https://git-for-windows.github.io/
// -- cmake(3.4.1) : https://cmake.org/download/
> git clone https://github.com/takarakasai/rsx.git
> cd rsx
> . setup_mingw.sh <<<< Windows ではこれが必要です
> mkdir build
> cd build
> cmake ..
> ccmake ..
CMAKE_INSTALL_PREFIX: 任意のインストールディレクトリ
ENABLE_MATLAB_API : ON
HR_SERIAL_AUTO_READ_ECHO_DATA : ON (ローカルエコー有の場合)
HR_SERIAL_AUTO_READ_ECHO_DATA : OFF (ローカルエコー無の場合)
> make
> make install
|
※ 必要に応じてPATHを通してください.
※ WindowsもしくはMATLABが32bitの場合にはMinGWも32bit環境を用意する必要があります
(http://www.mingw.org/).
私は試したことありませんがおそらく以下のpkgがMinGW上で必要となるはずです.
mingw-base mingw-gcc mingw32-gmp(dev) msys-ligbmp(dev)
7.起動手順 Linux/Windows
Linux の場合
1
2
| > cd ${インストールディレクトリ}
> LD_LIBRARY_PATH=${LD_LIBRARY_PATH}:../lib matlab
|
Windows の場合
1
2
3
| MATLAB起動後にインストールディレクトリ以下のlib/mexを
MATLABのPATHに追加してください
(これであっているはず...)
|
7.1 実行手順 KHR3-HV (1関節だけ)
実行手順はポート名を除きLinux/Windowsで共通です.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
|
>> dps_assign('ics')
>> dps_add_servo(uint8(1))
id:1
>> dps_open('ttyUSB','0',int32(115200))
dev:ttyUSB port:0 baudrate:115200
file open : /dev/ttyUSB0
>> dps_open('COM','0',int32(115200))
dev:COM port:0 baudrate:115200
file open : COM0
>> dps_set_state(uint8(1), 'on')
id:01 state:on
>> dps_set_goal(uint8(1), 30.0)
|
7.2 実行手順 KHR3-HV (複数関節)
実行手順はポート名を除きLinux/Windowsで共通です.
1
2
3
4
5
6
7
8
9
|
>> dps_set_servo(uint8([6, 7, 8, 9, 10]))
5 : 06 07 08 09 10
>> dps_set_states('on')
>> dps_set_goals([20.0, 0.0, 0.0, 0.0, 0.0, 0.0])
id:all : 20.000000 -30.000000 0.000000 0.000000 0.000000 0.000000 0.000000
|
7.3 実行手順 KHR3-HV (offset設定)
実行手順はポート名を除きLinux/Windowsで共通です.
1
2
3
4
5
|
>> dps_set_offset(uint8(1), 10.0)
id:01 oangle:10.0
>> dps_set_offsets([10.0, 0.0, 0.0, 0.0, 0.0, 0.0])
6 : 10.0 0.0 0.0 0.0 0.0 0.0
|
※ 極性の設定は今後対応予定です (mex対応するの忘れてた…).
7.1実行手順 GR001
実行手順はポート名を除きLinux/Windowsで共通です.
8.1 まとめ
- MATLABでGR001とKHR3-HVを動作させる為のMEXファイルを作成しました
- WindowsとLinuxで動作することを確認しました(OSXでも多分動く)